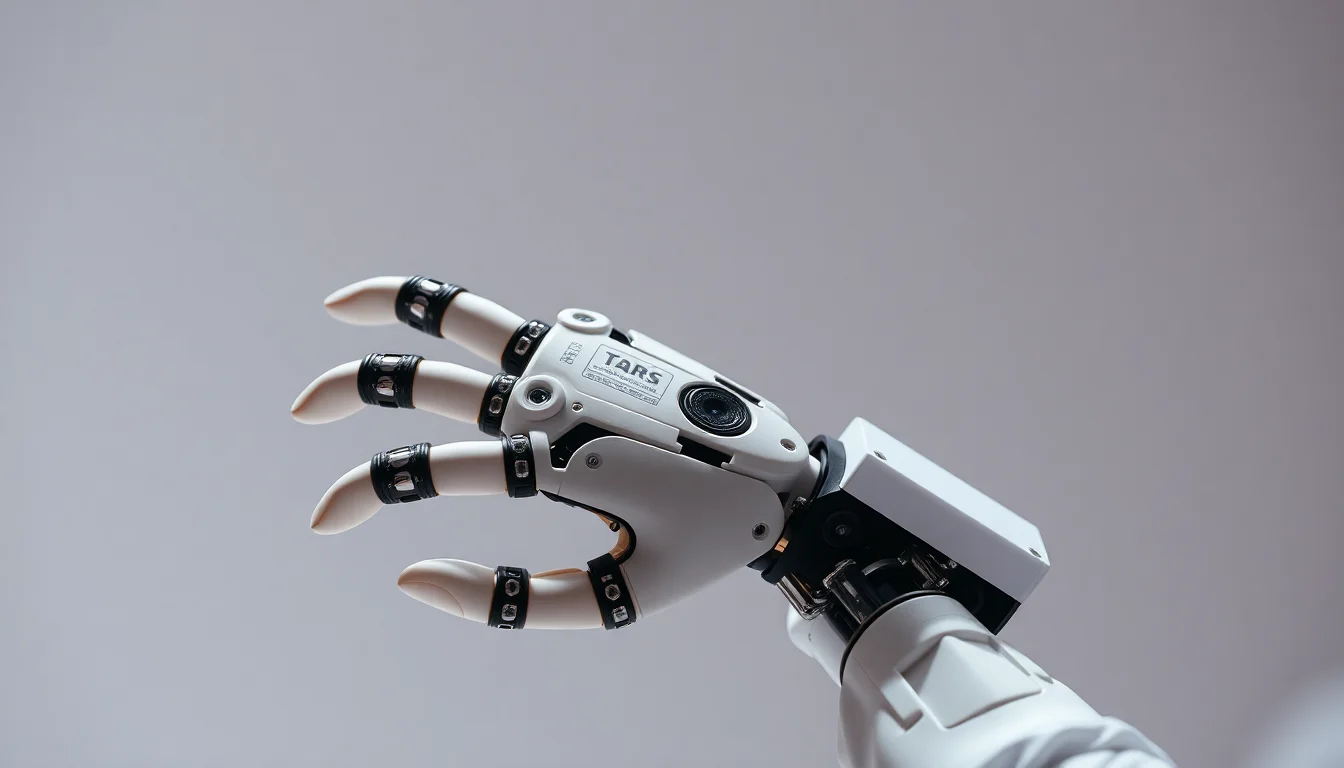
DexHand’s appearance at ICRA 2026 did what good robotics demos are supposed to do: it made a technical claim legible in a few seconds. TARS’ platform showed a 21-DoF, 1:1 biomimetic hand topology, executed 26 sign-language gestures, and offered real-time mirror-control interaction with low-latency responsiveness. In a field where manipulation failures often begin with poor kinematic fidelity, that is a meaningful signal.
But for operators, engineers, and investors, the more important question is not whether the hand can look and move humanlike in a conference hall. It is whether that biomimicry survives deployment reality.
DexHand at ICRA 2026: biomimicry lands, deployment realities begin
The technical pitch is straightforward. DexHand is modeled 1:1 on human metacarpal and phalangeal topology, and TARS says that design avoids the kinematic distortion common in conventional parallel-joint layouts. The company also highlighted the thumb’s CMC and MCP spatial convergence, which matters because thumb motion is where many grasping systems lose fidelity fastest.
That matters because hand design in robotics is not just about degrees of freedom. It is about whether the end effector can preserve human-like motion without introducing blind spots, awkward transitions, or control discontinuities. If a hand topology better matches the human hand, it can reduce the translation layer between intent and actuation. That is the promise behind DexHand’s real-time mirror-control demo.
The showpiece was not subtle: 26 sign-language gestures, live, with low latency. The demonstration suggests a system that can support natural teleoperation and fine manipulation more cleanly than less anatomically faithful designs. TARS also said the hand’s self-developed joints use high-precision reducers to minimize backlash and enable smoother micro-manipulation.
Those are the right ingredients for a serious manipulation stack. They are not, by themselves, a deployment proof.
What changes for deployment reality? Fidelity helps, but complexity rises too
A 1:1 biomimetic hand topology can reduce motion distortion in complex tasks, especially where a gripper-like abstraction is too blunt. That can matter in picking, assembly, tool use, lab handling, or any workflow that depends on subtle finger coordination.
But fidelity cuts both ways.
A more anatomically faithful hand usually brings more parts, more calibration requirements, and more failure modes. High-precision reducers and low-backlash joints help with control quality, but they also increase the importance of serviceability, tolerance management, and spare-parts logistics. The closer a robotic hand gets to human complexity, the more it inherits human-hand-like maintenance burdens without human tissue’s adaptability.
That is the core deployment tradeoff. Biomimicry can improve task performance, but it also raises the cost of keeping the system aligned. Even if the motion model is elegant, operators still need to manage sensor drift, joint wear, calibration loss, and integration friction with perception and planning software.
In other words: the better the hand, the harder the system.
Operational implications: control, latency, and safety on the factory floor
The phrase that matters most in DexHand’s demo is probably not “biomimetic.” It is “real-time mirror-control.” Low-latency response is what makes teleoperation feel usable and what allows a human operator to correct a robot’s behavior before a small error becomes a dropped part or a safety incident.
For factory deployment, that latency budget has to hold across the whole stack, not just the hand. The control loop includes perception, motion planning, inference, comms, and actuation. A hand can be mechanically responsive and still be operationally slow if the system around it is not tuned.
That is why biomimetic fidelity alone does not create deployability. It has to be paired with:
- robust perception fusion to understand object pose and contact state,
- safety interlocks that can handle human proximity and unexpected contact,
- operator training that fits existing workflows,
- and control software that degrades gracefully when the environment stops behaving like a demo.
For engineers, the question is whether DexHand’s architecture can be inserted into current autonomy stacks without forcing a rewrite of the rest of the manipulation pipeline. For operators, the question is whether it can be maintained by the same teams that already handle fleet uptime, calibration checks, and incident response.
For safety leads, the issue is whether the hand’s fine motion makes it easier to operate around people or simply harder to certify.
Commercial viability and ROI considerations
Investors will likely read DexHand as a proof point that embodied AI is no longer limited to broad, industrial grippers or lab-only prototypes. That is fair. But the business case will still hinge on total cost of ownership, not visual sophistication.
Several costs remain unresolved from the public demo alone:
- durability under repetitive use,
- maintenance intervals and part replacement,
- calibration time after servicing,
- integration cost with legacy automation systems,
- and support economics once the hand is part of a real deployment.
The reported use of high-precision reducers and reduced backlash hints at better long-term controllability, but it does not yet establish field economics. Unit economics only become persuasive when a system survives repeated cycles in environments that are not curated for a conference audience.
That means the adoption curve may depend less on whether DexHand is technically impressive and more on whether TARS can package it into a service model that enterprise buyers can actually operationalize. In robotics, the best mechanism rarely wins by itself. The best-supported mechanism does.
What to watch next
The next milestones will tell us whether DexHand becomes a platform, a product line, or a compelling demo.
Watch for field trials that specify task classes rather than broad ambition. Look for operator workflows that define how humans teach, supervise, and recover the system when things go wrong. Watch for safety certification work, especially in settings where human-robot proximity is unavoidable. And pay attention to interoperability: if DexHand cannot plug into existing autonomy stacks, its 1:1 topology will be technically elegant but commercially expensive.
That is why the ICRA moment matters. Industry coverage is framing DexHand as part of the broader trend toward embodied AI on the factory floor, not just as a robotics curiosity. The signal is that demand is shifting from abstract autonomy toward systems that can physically do useful work.
The test now is deployment reality. If DexHand’s low-latency mirror-control and 21-DoF biomimetic design can hold up outside the demo booth, it could help define the next phase of manipulation. If not, it will still have done something important: it will have raised the bar for what a credible robotic hand must prove before buyers sign.


